Embodied Uncertainty-Aware Object Segmentation
Xiaolin Fang,
Leslie Pack Kaelbling, and
Tomás Lozano-Pérez
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
[Paper]
[Website]
@inproceedings{Fang2024Uncos,
title={{Embodied Uncertainty-Aware Object Segmentation}},
author={Xiaolin Fang and Leslie Pack Kaelbing and Tomás Lozano-Pérez},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2024}
}

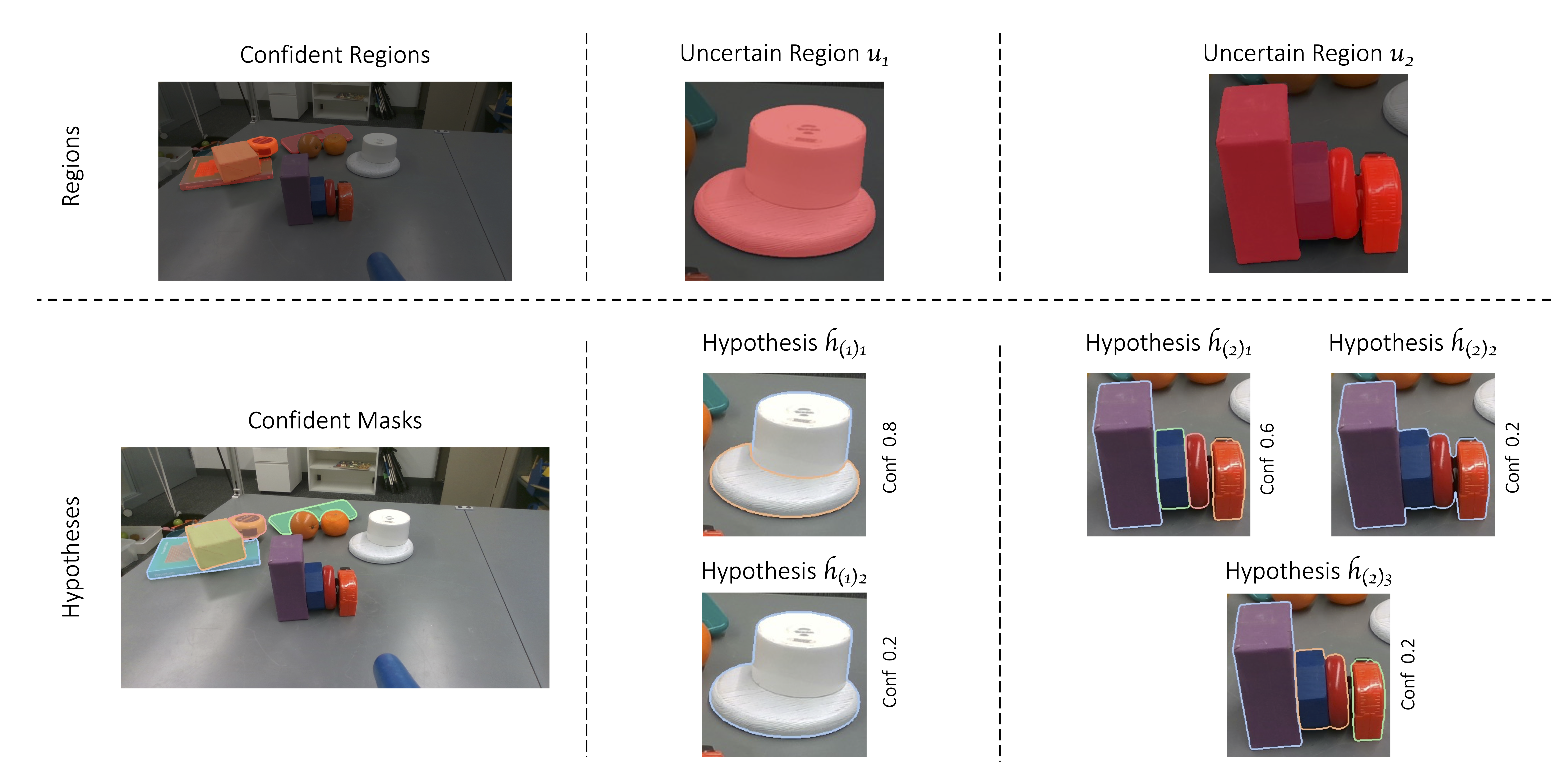
UncOS is an active prompting strategy for combining promptable top-down and bottom-up pre-trained large models to obtain a distribution over image-segmentation hypotheses. We can either query the most likely hypothesis from UncOS or use all the hypotheses as a basis for downstream applications, such as embodied object segmentation / active information gathering.
[News]
Support for the SAM2 backbone has been added!
Please specify the backbone option and provide the path to the checkpoint in config.py accordingly.
The code is tested with Python 3.10, CUDA 12.2, and PyTorch 2.4.0. CPU-only mode is supported.
(Optional) Create conda environment
conda create --name uncos_env python=3.10
conda activate uncos_env
Install UncOS directly
pip install git+https://github.com/FANG-Xiaolin/uncos.git
or clone the repository locally and install with
git clone [email protected]:FANG-Xiaolin/uncos.git
cd uncos; pip install -e .
We've provided a few testing examples in demo_files. Add -v
to visualize the results, -m to return the most likely segmentation
hypothesis.
python scripts/demo.py -v
To retrieve the most likely hypothesis from UncOS.
# rgb_image: rgb image in 0-255. (H x W x 3) np.uint8.
# pcd: point cloud in camera frame or world frame. (H x W x 3) np.float32.
from uncos import UncOS
uncos = UncOS()
pred_masks_boolarray, uncertain_hypotheses = uncos.segment_scene(rgb_im, pcd, return_most_likely_only=True)
pred_masks_boolarray is a list of predicted binary masks. [(H x W)] bool
Set return_most_likely_only to False for multiple hypotheses.
To visualize the result
# visualize the result
uncos.visualize_confident_uncertain(pred_masks_boolarray, uncertain_hypotheses)
# # or save to file
# uncos.visualize_confident_uncertain(pred_masks_boolarray, uncertain_hypotheses, show=False, save_path='demo_result.png')
Download the OCID dataset
-
Download the file from here and unzip it.
-
You may need to manually correct a folder name
cd OCID-dataset/ARID10/floor/bottom/fruits/seq37/ mv pd pcd
python scripts/benchmarking.py