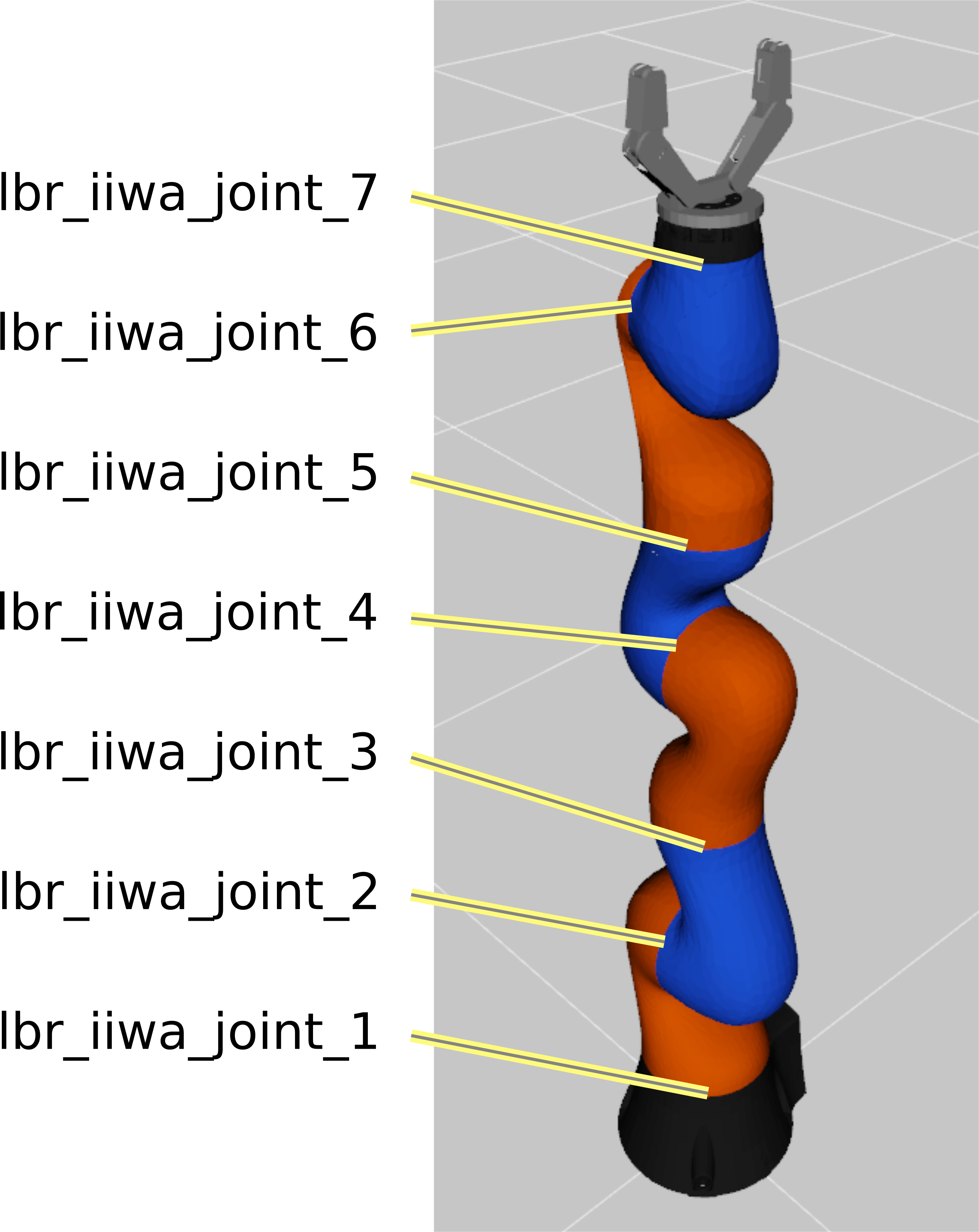
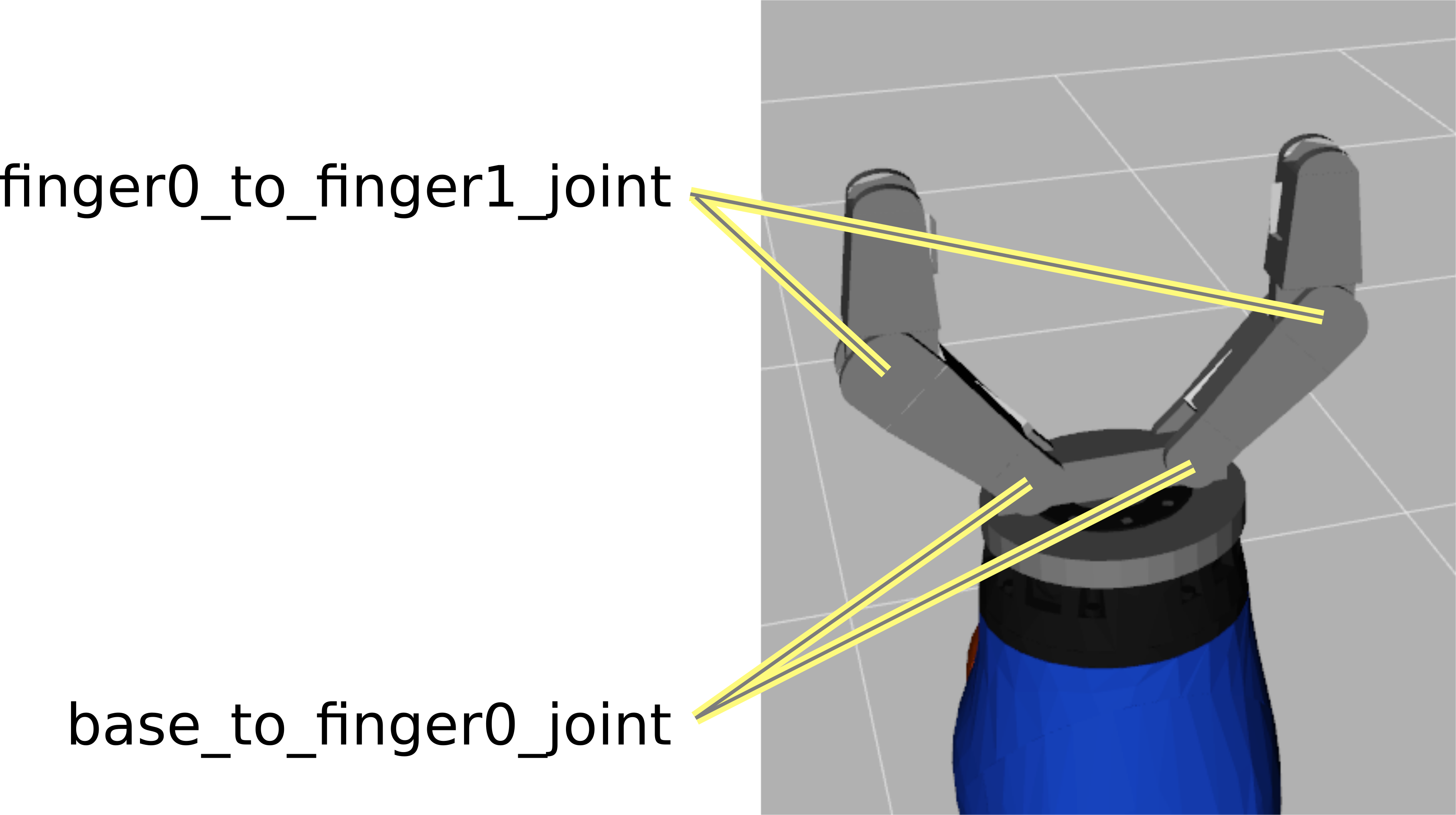
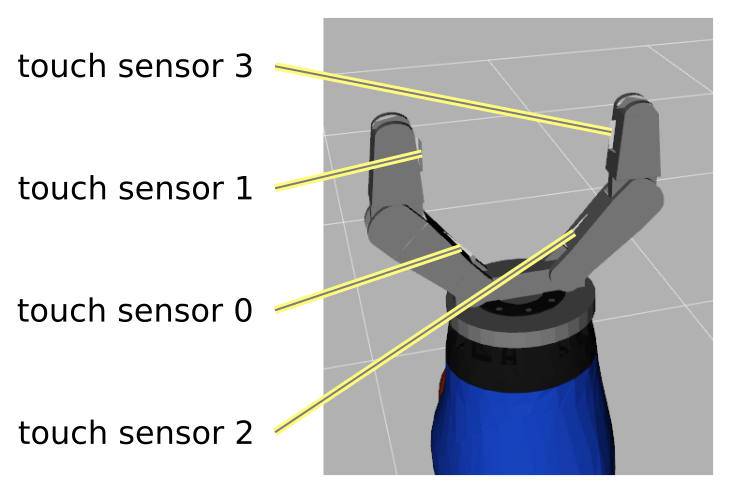
The REALRobot environment is a standard gym environment. It includes a 7DoF kuka arm with a 2Dof gripper, a table with 3 objects on it and a camera looking at the table from the top. The gripper has four touch sensors on the inner part of its links.
The actionattribute of env.step must be a vector of 9 joint positions in radiants.
The first 7 joints have a range between -Pi/2 and +Pi/2.
The two gripper joints have a range between 0 and +Pi/2. They are also coupled so that the second joint will be at most twice the angle of the first one.
|
 |
 |
The observation object returned byenv.step is a dictionary:
- observation["joint_positions"] is a vector containing the current angles of the 9 joints
- observation["touch_sensors"] is a vector containing the current touch intensity at the four touch sensors (see figure below)
- observation["retina"] is a 240x320x3 array with the current top camera image
- observation["goal"] is a 240x320x3 array with the target top camera image (all zeros except for the extrinsic phase, see below)
 |
The reward value returned byenv.step is always put to 0.
The done value returned byenv.step is set to True only when the intrinsic phase or an extrinsic trial is concluded (see below).
The environment is set to run as an "intrinsic phase" for a certain number of timesteps (env.intrinsic_timesteps , default 15M).
During the intrinsic phase, no goal is observed.
After env.intrinsic_timesteps have passed the intrinsic phase ends (done is set to True).
When using real_robots.evaluate, after the intrinsic phase ends, a number of extrinsic trials will be run.
Each extrinsic trial lasts env.extrinsic_timesteps (default: 10000).
During each extrinsic trial, a different goal is set and it will be displayed in the observation.
Each goal consists in moving the objects from a certain starting position to another position on the table.
The goal observation shows how the objects should appear when reaching the final position.
At the end of each extrinsic trial, real_robots.evaluate calls env.evaluateGoal to score that goal achievement.
Goals are loaded from an external goal dataset file (which can be chosen using env.set_goals_dataset_path).
A new goal dataset can be generated using the real-robots-generate-goals utility.